Next: Fluido incompressibile
Up: Equazione di bilancio della
Previous: Derivata sostanziale o totale
Indice
Un fluido si definisce newtoniano quando la sua viscosità non varia con la velocità. Matematicamente questi fluidi presentano un legame di proporzionalità diretta tra il tensore degli sforzi viscosi e il tensore delle velocità di deformazione; la costante di proporzionalità è detta viscosità.
Lo sforzo tangenziale scambiato tra due elementi di area unitaria di normale  in direzione
in direzione  adiacenti è direttamente proporzionale attraverso la viscosità dinamica
adiacenti è direttamente proporzionale attraverso la viscosità dinamica  al gradiente di velocità tra gli stessi.
al gradiente di velocità tra gli stessi.
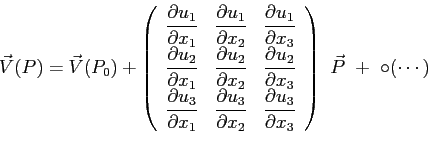
In genere il campo di velocità in seno ad un fluido può essere espresso in termini di sviluppo in serie nell'intorno del punto e nell'istante considerati:
Nell'intorno di un dato punto  nell'istante
nell'istante  con
con
 :
:
In notazione tensoriale:
ossia:
Il tensore sopra non è necessariamente simmetrico. Esso può comunque essere visto come somma di due parti, una simmetrica ed una antisimmetrica.
Riordinando:
In base alle osservazioni sull'espressione del rotore della velocità e l'Eq. (C.1)
Compaiono a questo punto a secondo membro i termini del prodotto vettoriale (Cf.ta Eq. (C.1)):
che rappresenta la velocità di rotazione rigida del punto in esame intorno al polo  .
.
Si riconoscono inoltre tra parentesi i termini di velocità di deformazione dell'elemento fluido: allungamento e scorrimento (Cf.ta Fig. C.1).
L'espressione definitiva della velocità nell'intorno del punto in esame sarà quindi:
ponendo:
si ottiene:
 |
(2.16) |
dalla quale risultano evidenti le componenti di velocità di traslazione rigida, di rotazione rigida e le deformazioni dovute alla dilatazione o contrazione (le
 ) e le distorsioni (le
) e le distorsioni (le
 ) dell'elemento fluido in considerazione.
) dell'elemento fluido in considerazione.
Il tensore della velocità di delle deformazioni nella Eq. (2.16) è simmetrico e suscettibile di diagonalizzazione rispetto ad un riferimento principale. La traccia di tale tensore, ossia la somma degli elementi sulla diagonale, è un invariante e rappresenta la divergenza della velocità .
Questa rappresenta la dilatazione subita dal volumetto di fluido considerato nell'unità di tempo. Se questo volumetto è inizialmente di forma sferica, a causa della caratteristica della deformazione, ossia dal valore assunto dagli autovalori, in generale potrà trasformarsi in un ellissoide. Se il fluido è incompressibile la
 , non si avranno variazioni in volume2.8 e le componenti di sforzo viscoso saranno dovute solo alle velocità di scorrimento
, non si avranno variazioni in volume2.8 e le componenti di sforzo viscoso saranno dovute solo alle velocità di scorrimento
 .
.
Gli sforzi viscosi saranno legati ovviamente al tensore delle velocità di deformazione e non al movimento di corpo rigido del fluido.
Subsections
Next: Fluido incompressibile
Up: Equazione di bilancio della
Previous: Derivata sostanziale o totale
Indice
2009-01-26